18.4 Operador \(B\)
18.4.1 Operador Retardo
Se representa con el símbolo \(B\) o \(L\), del inglés Backshift operator o Lag operator. Se define como:
\[ B Y_{t} = Y_{t-1s} \] donde \(Y_{t}\) es una serie temporal en el momento \(t\)
- \(B\) indica que se sustituye el valor en una fecha por el valor en el instante inmediatamente anterior.
\[ B Y_{t} \equiv B(Y_{t-1}) \equiv B:Y_{t-1} \]
- Una doble aplicación de \(B\) se denota por:
\[ B^{2} Y_{t}=B\left(B Y_{t}\right)=B Y_{t-1}=Y_{t-2} \]
- En general,
\[ B^{d} Y_{t} = Y_{t-d} \]
18.4.2 Operador Diferencia
Se representa con el símbolo \(\nabla\) - en inglés differencing. Se define por:
\[ \nabla Y_{t} = Y_{t} - Y_{t-1} \] donde \(Y_{t}\) es una serie temporal en el momento \(t\)
Ejemplos:
\[ \begin{aligned} Y_{1}-Y_{0} &=\nabla Y_{1}\\ Y_{2}-Y_{1} &=\nabla Y_{2}\\ Y_{n}-Y_{n-1} &=\nabla Y_{n} \end{aligned} \]
El operador diferencia regular de orden d ( \(d\geq 1\) entero) se representa por \(\nabla^{d}\) (a veces \(\Delta^d\)) y denota la aplicación sucesiva de \(\nabla:\)
\[ \nabla^{d} Y_{t} = (1-B)^d Y_{t} \]
Por ejemplo:
\[ \begin{aligned} \nabla^{2} Y_{t} &=(1-B)^{2} Y_{t}=\left(1-2 B-B^{2}\right) Y_{t} \\ \nabla^{3} Y_{t} &=Y_{t}-3 B Y_{t}+3 B^{2} Y_{t}-B^{3} Y_{t} \end{aligned} \]
\(\nabla^{s}\) denota la diferencia estacional definida por:
\[ \nabla^{s} Y_{t} = (1-B^s) Y_{t} = Y_t - Y_{t-12} \]
18.4.3 Operador Adelanto
Se representa con el símbolo \(B^-\) o \(F\), del inglés Forward operator.
\[ B^{-1}Y_{t} = Y_{t+1} \] donde \(Y_{t}\) es una serie temporal en el momento \(t\)
- \(F\) Es el operador de retardos utilizado en el sentido inverso, es decir \(d<0\), una nueva serie va a estar adelantada en \(d\) unidades de tiempo.
- \(B^{-1}\) es llamado lead operator
- En general, \[B^{-d} Y_{t} \equiv B^{-d}(Y_{t}) = Y_{t+d}\]
18.4.4 Propiedades de B
- El retardo de una constante es una constante, \(c\):
\[ Bc=c \]
- Propiedad distributiva:
\[ \left(B^{i}+B^{j}\right) Y_{t}=B^{i} Y_{t}+B^{j} Y_{t}=Y_{t-i}-Y_{t-j} \]
- Propiedad asociativa:
\[ \begin{aligned} B^{i} B^{j} X_{t}&=B^{i}\left(B^{j} Y_{t}\right)=B^{i} Y_{t-j}=Y_{t-i-j}\\ B^{i} B^{j} X_{t}&=B^{i+j} y_{t}, \text { y } \\ B^{0} X_{t}&=X_{t} \end{aligned} \]
- Si \(|a| < 1,\)
\[ \left(1+a B+a^{2} B^{2}+a^{3} B^{3}+\ldots\right) Y_{t}=\frac{Y_{t}}{(1-a B)} \]
18.4.5 Ecuaciones en Diferencias
- Una ecuación en diferencias expresa el valor de una variable en función de sus propios valores rezagados, tiempo y otras variables.
- El operador \(B\) puede ser utilizado para escribir ecuaciones en diferencias de forma compacta:
\[ \begin{aligned} Y_{t} &=a_{0}+a_{1} Y_{t-1}+\ldots+a_{p} Y_{t-p}+\varepsilon_{t} \\ \left(1-a_{1} B-a_{2} B^{2}-\ldots-a_{p} B^{p}\right) Y_{t} &=a_{0}+\varepsilon_{t}\\ \Rightarrow A(B) X_{t}&=a_{0}+\varepsilon_{t} \end{aligned} \] donde \(A(B)\) puede ser visto como un polinomio del operador \(B.\)
- Otro ejemplo:
\[ \begin{aligned} X_{t} &=a_{0}+a_{1} X_{t-1}+\ldots+a_{p} X_{t-p}+\varepsilon_{t}+\beta_{1} \varepsilon_{t-1}+\ldots+\beta_{q} \varepsilon_{t-q} \\ A(B) X_{t} &=a_{0}+M(B) \varepsilon_{t} \end{aligned} \]
El operador \(B\) puede ser utilizado para resolver ecuaciones en diferencias:
\[ Y_{t} = a_{0}+a_{1} Y_{t-1}+\varepsilon_{t} \\ Y_{t} = a_{0}+B Y_{t}+\varepsilon_{t} \\ Y_{t} = \frac{a_{0}+\varepsilon_{t}}{1-a_{1} B} \]
18.4.6 Ejemplo:
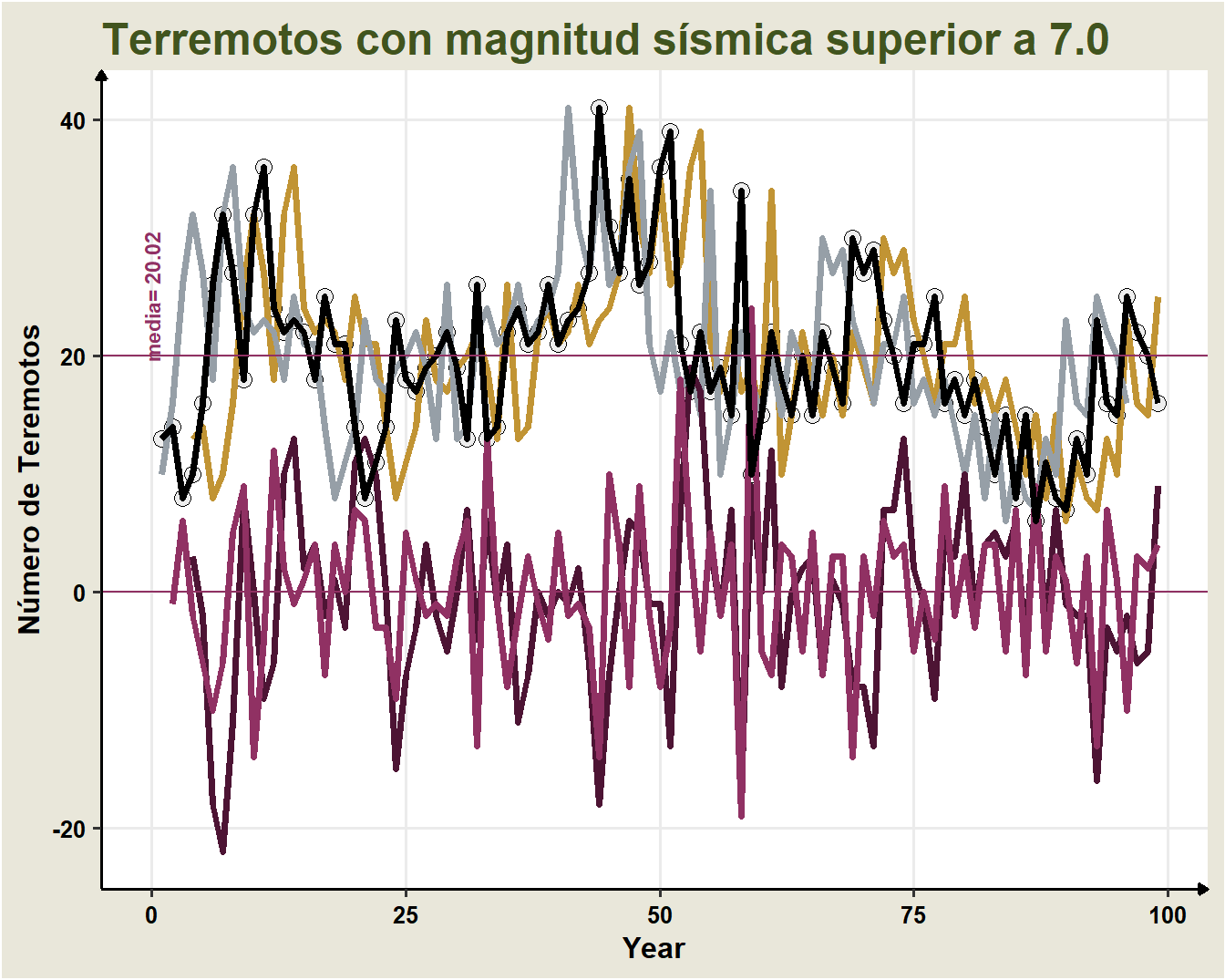
Aplicamos el operador \(B\) a la serie de terremostos:
| \(t\) | \(Y_t\) | \(BY_{t}\) | \(B^3Y_{t}\) | \(B^{-1}Y_{t}\) | \(B^{-1}Y_{t}\) | \(\nabla Y_{t}\) | \(\nabla^{3}Y{t}\) |
|---|---|---|---|---|---|---|---|
| 1 | 13 | NA | NA | 14 | 10 | NA | NA |
| 2 | 14 | 13 | NA | 8 | 16 | -1 | NA |
| 3 | 8 | 14 | NA | 10 | 26 | 6 | NA |
| 4 | 10 | 8 | 13 | 16 | 32 | -2 | 3 |
| 5 | 16 | 10 | 14 | 26 | 27 | -6 | -2 |
| 6 | 26 | 16 | 8 | 32 | 18 | -10 | -18 |
| 7 | 32 | 26 | 10 | 27 | 32 | -6 | -22 |
| 8 | 27 | 32 | 16 | 18 | 36 | 5 | -11 |
| 9 | 18 | 27 | 26 | 32 | 24 | 9 | 8 |
| 10 | 32 | 18 | 32 | 36 | 22 | -14 | 0 |